


Introduction
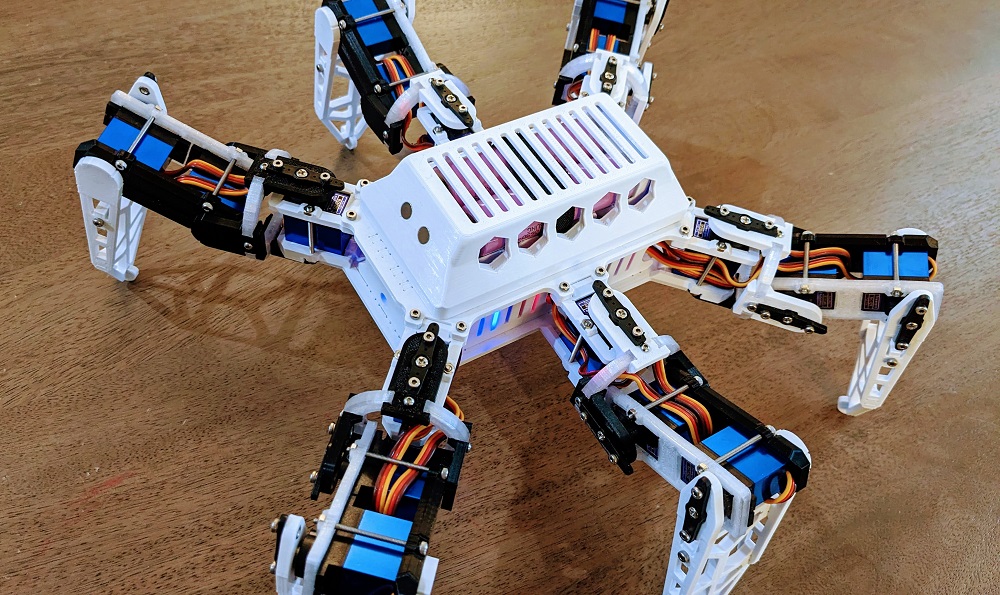
This is a hexapod robot based on Smallp Tsai‘s hexapod-v2-7697 project. This project reused most of the mechanical design in the original project, but with a full redesign of the circuits and software. The table below shows the difference between this project and the original one.
| Original hexapod-v2-7697 | This project | |
|---|---|---|
| Controller | Linkit 7697 | Raspberry Pi Zero W or Raspberry Pi Zero W 2 |
| PWM control | Custom circuit board | 2 x PCA9685 motor driver boards |
| DC-DC | 7 x mini360 modules | 2 x XL4005 5A Max DC-DC modules and 1 x mini360 |
| Power | 2S Lipo battery | 2 x 18650 batteries |
| Remote | BLE | WiFi, Bluetooth |
| Remote software | Android and iOS | PC, Android |
2 Comments
Tenzin Kuenkhyab · March 25, 2024 at 2:20 pm
Hello, i have read about your hexapod project and i found it quite interesting and want to build one to help myself learn. But while procuring materials i have failed to understand what type of servo motor you used. I have read it was TowerPro MG92B, but is it a continuous servo motor or standard servo motor?
Would be really grateful if you could reply
Zhengyu Peng · April 10, 2024 at 5:43 pm
It is a standard servo motor